Project planning
An initial problem that will be addressed during this project is the modelling of aerodynamic phenomena. This is an essential issue that has to be solved before designing autonomous pilots. We will consider three phases of flight: (a) hover (or stationary) flight, (b) fast forward flight, and (c) transition from hover to fast forward flight (and vice versa). While significant research has been done in the modelling in phases (a) (for conventional multi-copters) and (b) (for conventional air planes) there are very few results describing modelling in phase (c). However, this is a very important aspect in our project and we will address it in an initial phase of the project.
The goal being that the convertible aircraft be capable of flying without human pilot intervention from a point A on the map to a point B on a given trajectory (which minimizes energy consumption), in a second phase of this project, we will work on the design of fault tolerant trajectory tracking algorithms. An important aspect of autonomous flight is safety. Under no condition the convertible aircraft should pose a security risk for people, other aircraft or itself. That is why during this project phase we intend to work on the design of fault tolerant control algorithms. With respect to the trajectory planning, an important aspect is conversion from stationary to fast forward flight with minimum dispense of energy.
To complete the fault tolerant control design in this project, fault detection algorithms shall be investigated as well. Among possible defects, we will consider the loss of actuators (propeller rotors) or sensors (inertial measurement units).
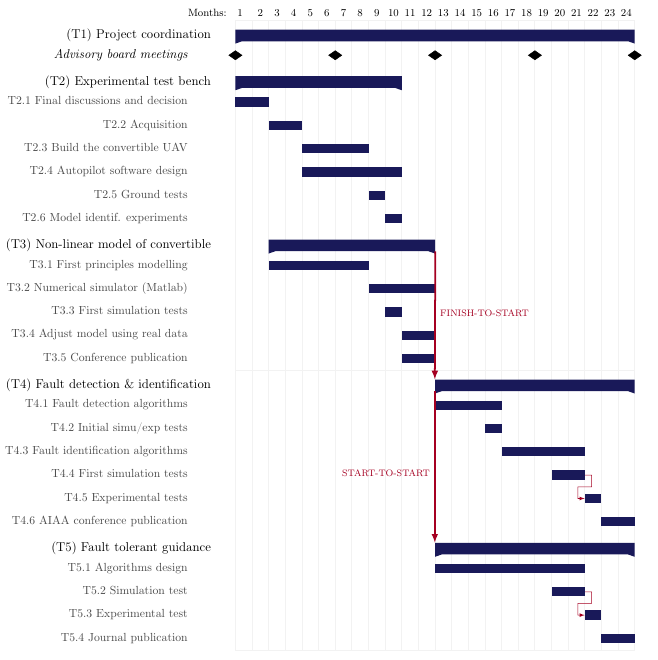
A provisional Gantt diagram for this project is given below: